
直交型ロボット
AXELIA AXGシリーズ
多機能で使いやすい 3軸・4軸タイプ
直交型ロボットAXGシリーズはワーク質量が重い場合やインライン化されたラインで効果を発揮する直交型ロボットです。ワーク設置ヶ所がフリーになっており、重量物のワークでも設置に困りません。また、高可搬質量タイプで大型のツールも選ばす搭載が可能です。
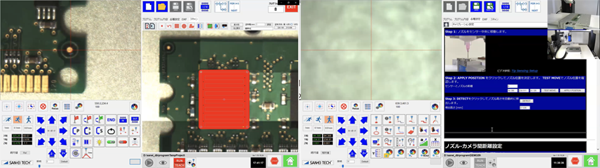
制御ソフト Fluid magic coating
システムラインナップ
AXG400
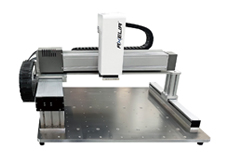
AXG600

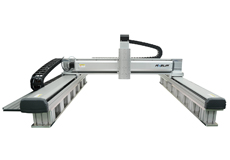
AXG0812
オプション
CCDフロントカメラ ・ ノズルアジャスタ ・ ティーチングペンダント ・ ピラーユニットノズルディテクトセンサ ・レーザーハイトセンサ ・タッチハイトセンサ
※各種カスタマイズに対応いたします
AXGシリーズ 製品仕様
| AXG400 | AXG600 | AXG0812 | ||
|---|---|---|---|---|
| 軸数 | 3 | |||
| 最大作業領域 (X / Y / Z) | 400 × 400 × 100 mm | 600 × 600 × 150mm | 800 × 1200 × 150mm | |
| 搭載荷重(ツール) | 5kg | 20kg | ||
| 重量 | 73kg | 110.5kg | 162kg | |
| 寸法 | 1007.5 x 760 x 710.5mm | 1219.5 x 956.5 x 682mm | 1419.5 x 1564 x 682mm | |
| 最大速度 (XY / Z) | 500 / 300 mm/sec | 800 / 200 mm/sec | ||
| 駆動システム | 5相マイクロステッピングモーター | XY軸:ステッピングモーター Z軸:ステッピングモーター(ブレーキタイプ) |
||
| メモリ容量 | PC ストレージ | |||
| 汎用I/O | 32入力 / 32出力 | |||
| 入力AC(電源への入力) | AC100〜240V | AC100〜115V AC200〜230V ※2機種展開 | ||
| 繰り返し精度* | ±0.02 mm/軸 | ±0.05 mm/軸 | ||
| ビジョン | CCDカメラ(オプション) | |||
| ディスペンスソフトウェア | Fluid Magic | |||
| ノズル検出 | ノズル検出器(オプション) | |||
| ティーチングペンダント | (オプション) | |||
| 高さ検出 | レーザー(オプション) | |||
